
Algorithms Beyond the Horizon
Deep dives into GNC algorithms, sensor fusion, and autonomous systems for orbital and deep-space missions.
Algorithms Beyond the Horizon
Deep dives into GNC algorithms, sensor fusion, and autonomous systems for orbital and deep-space missions.

Latest from the Lab
- The New Lunar Gold Rush: How Commercial Rovers are Scaling Autonomous Mobility
 The lunar exploration paradigm is shifting from multi-billion-dollar, Rad-Hard institutional rovers to agile, modular platforms built with COTS components. To compensate for strict SWaP constraints and reduced sensor redundancy, commercial vehicles like SAS’s LUVMI-X, Astrobotic’s CubeRover, and Australia’s Roo-ver rely on aggressively optimized software. By leveraging Light-Weight SLAM, Visual Odometry, and calculated algorithmic risk for high-tempo Hazard Avoidance, these software-defined rovers act as the automated logistics infrastructure for the emerging cis-lunar economy. This transition proves that scalable autonomous navigation is no longer a scientific luxury, but an indispensable engineering commodity for sustained In-Situ Resource Utilization (ISRU).
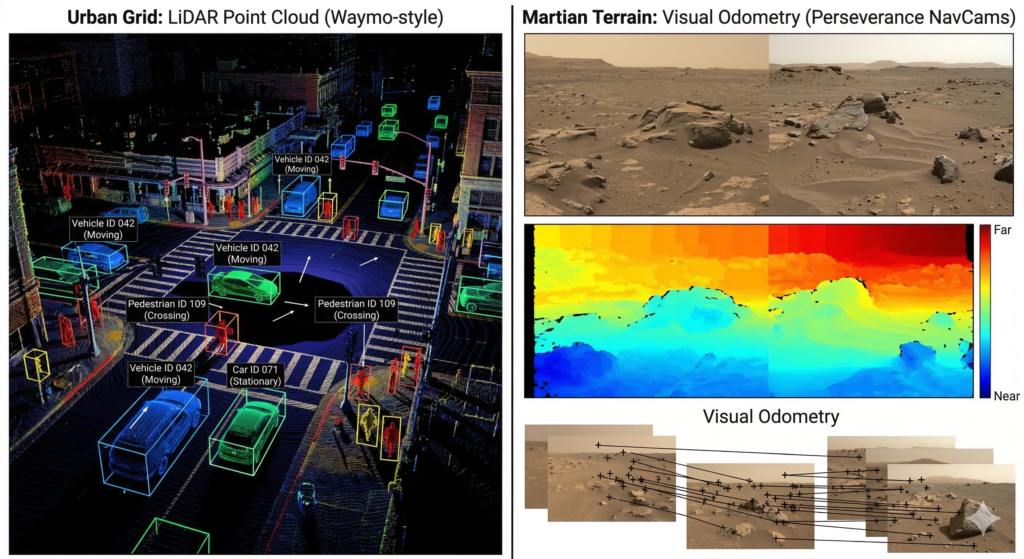
The lunar exploration paradigm is shifting from multi-billion-dollar, Rad-Hard institutional rovers to agile, modular platforms built with COTS components. To compensate for strict SWaP constraints and reduced sensor redundancy, commercial vehicles like SAS’s LUVMI-X, Astrobotic’s CubeRover, and Australia’s Roo-ver rely on aggressively optimized software. By leveraging Light-Weight SLAM, Visual Odometry, and calculated algorithmic risk for high-tempo Hazard Avoidance, these software-defined rovers act as the automated logistics infrastructure for the emerging cis-lunar economy. This transition proves that scalable autonomous navigation is no longer a scientific luxury, but an indispensable engineering commodity for sustained In-Situ Resource Utilization (ISRU). - What Self-Driving Cars Can (and Can’t) Teach Space RoversThe convergence of terrestrial autonomous vehicles and planetary rovers reveals profound algorithmic and architectural intersections. While self-driving cars process immense data using high-performance processors in structured environments, space rovers navigate unstructured, high-radiation terrains constrained by severe power limits and communication latency, historically relying on legacy rad-hardened hardware. Today, this paradigm is shifting. The aerospace sector is actively integrating automotive Deep Reinforcement Learning, hybrid computing, and photorealistic simulations to achieve robust autonomous navigation. Conversely, the automotive industry leverages space-proven fault-tolerance and remote teleoperation strategies to master complex urban edge cases, driving a mutual evolution in robotics.
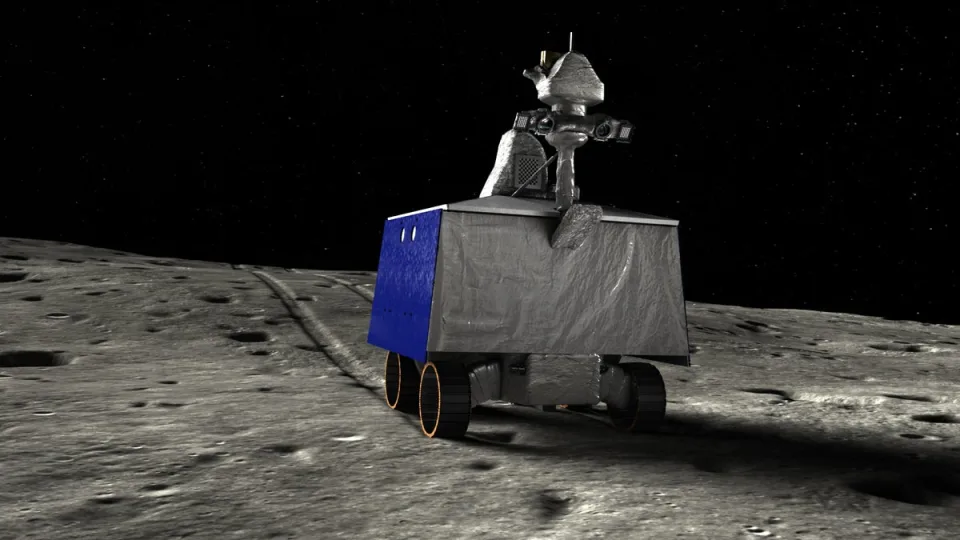
- VIPER: The New Challenge of AI Navigation in Permanent Moon ShadowsThis article provides a comprehensive engineering review of the VIPER rover AI navigation system, designed for the extreme conditions of lunar Permanently Shadowed Regions (PSRs). Resurrected for a 2027 Blue Origin launch, VIPER abandons traditional passive solar navigation. Instead, it employs active LED illumination and robust visual odometry to counteract dynamic shadowing. To ensure survival in cryogenic darkness, the architecture leverages computationally efficient grid-based algorithms like D* Lite for real-time hazard avoidance and Extended Kalman Filters (EKF) for precise kinematic slip estimation on porous regolith. Ultimately, VIPER’s hybrid “Earth-in-the-Loop” autonomy establishes the technical baseline for future Artemis surface operations.

Meet the founder

Hi, I’m Tommaso. Aerospace Engineering student & Rover enthusiast. Currently designing Mars rover prototypes at Politecnico di Milano with the PoliSpace team. I created Beyond The Joystick to bridge the gap between complex GNC algorithms and real-world robotics. From embedded systems to autonomous navigation, I’m here to explore how machines understand the unknown.
